AIロボット導入が本番で問題になる理由
- kanna qed
- 2025年12月31日
- 読了時間: 5分

――精度不足ではなく「説明責任(Accountability)」の欠如
導入|なぜPoCの成功は、社会実装の失敗を招くのでしょうか
AIロボットの性能は、実験場(PoC)では完璧に見えるものです。しかし、いざ本番導入・量産・社会実装の段階に入ると、プロジェクトは突如として凍結されてしまいます。
多くの経営者は「精度が足りない」「コストが見合わない」と結論づけますが、それは表面的な理由に過ぎません。真の理由は、事故や異常が発生した際に、その瞬間の判断の正当性を誰も証明できない「設計上の欠陥」にあるのです。

第1章|AIロボットが直面している「責任蒸発」の壁
1-1. 「動作ログ」はあっても「判断の証拠」がありません
センサー値や映像、タイムスタンプは記録されています。しかし、第三者が検証しようとしたとき、決定的な問いに答えることができません。
「なぜその時、止まらなかったのですか?」
「なぜ回避ではなく、その動作を選択したのですか?」
【2025年最新事例:Cruiseの教訓】 サンフランシスコでのCruiseロボットタクシーの事故(2023-2025)では、歩行者をドラッグしてしまったAIの判断根拠が第三者検証できず、NHTSA(米国運輸省道路交通安全局)から「再現性が不十分」と断じられました。結果として、数百万ドルの罰金と運用凍結を招いたのです。ログは存在していました。しかし、「判断の正当性」を裏付ける証拠が欠落していたのです。
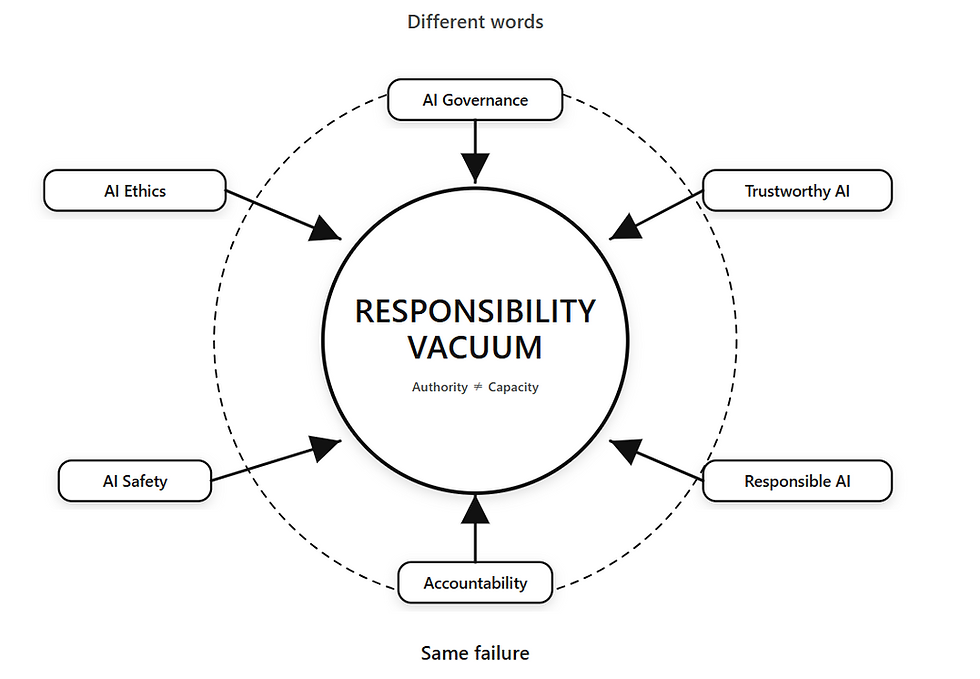
1-2. 責任が蒸発する構造
異常が起きた際、関係者はそれぞれの「正論」を述べます。
設計者:「学習データにない、想定外のケースだった」
運用者:「システムは仕様通りに稼働していた」
管理者:「運用ルール上の不備は見当たらない」
誰も責任を引き受けられないまま、社会的な信頼だけが失われていく。これが「責任蒸発」の正体です。
第2章|問題の本質は「責任境界」の設計不在
多くのAIロボットにおいて、「どこまでであれば安全を保証できるか」という物理的・論理的な境界が定義されていません。
この境界が不明確な状態では、以下のプロセスを適正に運用できません。
安全宣言: どのような環境条件において安全を保証するのか。
停止判断: どの時点で自律制御を切り離すべきか。
責任確定: 境界の内側で発生した事象の責任をどう整理するか。
【2025年最新事例:Waymoのリコール】 2025年5月、Waymoは1,200台以上の車両をリコールしました。AIが静止物体を誤認識した際、エッジケース(特殊な照明条件等)における判断ポリシーがブラックボックス化していたため、検証に時間を要し、社会実装の計画に影響を及ぼしました。
第3章|GhostDrift / ADIC による解決アプローチ
GhostDrift / ADICは、AIの判断を客観的に検証可能な形に変換する基盤を提供します。これはAIの性能向上ではなく、判断の「証拠化」を目的としたアーキテクチャです。
3-1. Commit:運用範囲の事前定義
「センサーの信頼分布」「環境条件」「制御ポリシーの許容範囲」を、実行前に「境界仕様」として確定させます。
3-2. Ledger:判断根拠の記録
AIが行った全ての判断(入力、推論、境界内判定、出力)を、改ざん不能な形式で記録します。これにより、「入力値が事前に定義した境界内であったため、制御を継続した」といった判断プロセスを、事後的に証明することが可能になります。
3-3. Verify:責任の所在を明確化
事故や異常が発生した際の検証プロセスを定型化します。
境界内の動作: システム設計の正当性を証明し、不可抗力としての整理を可能にします。
境界外の動作: 設計範囲外であることを明示し、即座に制御を遷移させます。
属人的な解釈を排除し、計算機的に責任の分界点を明確にする仕組みです。
第4章|適用が期待される領域
この仕組みは、説明責任が厳格に問われる以下の領域で特に有効です。
工場の協働ロボット: 人とロボットが共存する環境での安全認証。
倉庫・物流のAMR / AGV: 接触事故発生時の原因究明。
サービス・介護ロボット: 公共空間における責任分界点の明確化。
自律走行システム: AIが自らの限界(境界外)を認識するための制御知能。
結論|社会実装に必要なのは「判断の透明性」
AIロボットの本番導入を阻んでいるのは、技術的な賢さ以上に、万が一の際のリスク管理体制です。判断プロセスに責任の所在を残す設計が、現在のシステムには不足しています。
GhostDrift / ADIC は、技術者、経営層、法務、そして規制当局が、共通の尺度でAIの安全性を評価するための基盤となります。この設計を導入することで、AIロボットは「制御不能なブラックボックス」から「信頼可能な社会インフラ」へと移行することが可能になります。
AI説明責任プロジェクトについて
本レポートで提示した「Commit / Ledger / Verify」の構造を、実装可能な形で提供しているのが **AI説明責任プロジェクト(GhostDrift)**です。
👉 AI説明責任プロジェクト https://www.ghostdriftresearch.com/%E8%A4%87%E8%A3%BD-adic-1
English Summary
Title Addressing the Accountability Gap: The Critical Path to Social Implementation of AI Robotics
Abstract This report identifies the lack of "accountability design" as the primary reason why AI robot projects often fail to move beyond the PoC stage. While traditional logs provide data, they do not offer verifiable evidence of the legitimacy of AI judgments. This leads to "responsibility evaporation" during accidents. We propose the GhostDrift / ADIC architecture, which utilizes a Commit-Ledger-Verify framework to define operational boundaries and record immutable judgment processes. By transforming AI inference into verifiable evidence, this approach provides the necessary legal and regulatory foundation for the reliable deployment of autonomous systems in society.


コメント